今天马斯克又抛出了一个“暴论”,我们来聊聊这个闹得挺热的话题——无人驾驶(Robotaxi)的路线之争。
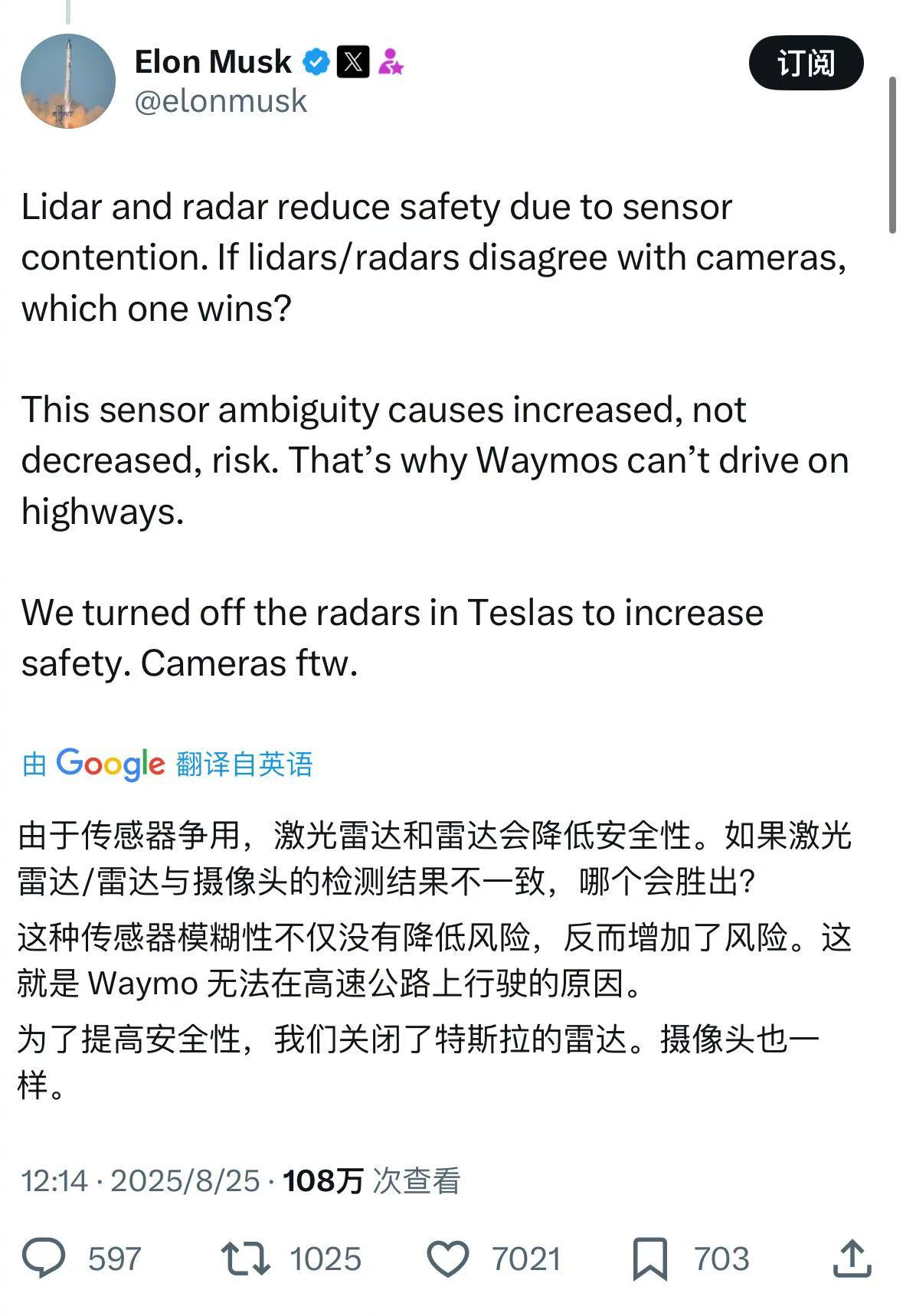
马斯克的观点上午已经说了,他觉得装上激光雷达和雷达,不仅没必要,甚至会让自动驾驶更危险,观点一出立刻又引发了行业里的争议。与此同时,Uber的CEO站出来说,会坚定支持百度萝卜快跑的路线,还达成了全球最大规模的无人驾驶合作。中国这边规模最大的百度萝卜快跑,李彦宏此前的讲话,整个局面就变得很有意思:特斯拉的纯视觉、Uber和百度的激光雷达融合,再加上李彦宏比较理性和务实的判断,三大家的分野,清晰地摆在我们眼前。
我们先来拆开看。
1)特斯拉为什么坚持纯视觉?马斯克说得很绝对:激光雷达会制造更多不确定性,会和摄像头数据冲突,从而降低安全性。可有意思的是,特斯拉在路测阶段,也确实用过激光雷达来采集数据。这背后的逻辑,其实是“用来训练,不用来量产”。换句话说,他要的是一种“数据采集工具”,而不是“产品硬件”。马斯克更深层次的考量,我觉得有两个:第一是算法信仰——他认为人类驾驶主要依赖视觉,所以AI也必须用视觉来学,最终才能比人类更强;第二是成本。你要知道,十年前一颗64线的激光雷达要八万美元,这在量产车上几乎不可能普及。虽然今天成本大幅下降,但在马斯克眼里,哪怕便宜一半,也还是拖慢了普及的步伐。所以,特斯拉选择了一条“算法优先、成本极简”的激进路线。
2)Uber现在是一个系统整合商,选择全球能合作的伙伴做Robotaxi,选择萝卜快跑?其实很简单——Uber的目标是商业落地,是让无人出租车尽快上路赚钱。要在复杂的海外环境里跑得稳、规模化,就需要可靠的安全冗余。这点上,激光雷达路线显然更合适。你可以理解为:Uber要的是一个“马上能用”的方案,而不是一个“未来也许能用”的梦想。合作也挺有标志性:2025年下半年,Uber和百度会在中东、亚洲推出无人出租车,接下来还要扩展到欧洲市场,几年内投入数千辆车。对于Uber来说,这不仅是技术选择,更是战略押注——在出行市场的全球竞争里,他们要抓住先发优势。
3)最后说说百度的萝卜快跑,说说李彦宏的观点(Robin在技术趋势考虑上是很靠谱的),态度其实很理性。他承认:纯视觉未来有空间,但目前真正跑通、能大规模上路的,还是激光雷达融合。这里的关键点在于成本下降。十年前的“天价”硬件,现在已经变成几万元一套。规模化生产把价格拉下来了,也让激光雷达从“奢侈品”变成了“标配”。
未来的趋势是什么呢?从数据说话。加州DMV的报告显示,Waymo(走激光雷达路线)每百万英里才需要人工介入0.68次,而特斯拉的纯视觉则是3.2次。差距很明显。再看恶劣天气:夜间行人检测,激光雷达的准确率是98.5%,纯视觉只有82%。下雨起雾,纯视觉的误检率能升高4倍,而激光雷达只升高1.2倍。
备注:激光雷达在下雨和起雾是有用的,至少比单个视觉好点,激光雷达更像是“保险”,给系统加了一层安全冗余,也许不是最优雅的解法,但是最稳妥的。
在AI发展的路径中,纯视觉是一种方式,也并非没有未来,想象空间在于——一旦算法真的大幅突破,摄像头+AI可能最终实现比人类更高的驾驶水平。但问题在于,这条路需要时间,需要大量数据训练,也需要一次又一次算法迭代。特斯拉选择了最艰难的一条路,而马斯克的性格,就是要赌在这种“最难、但一旦成功就颠覆全行业”的选择上。
所以,你会发现,这三条路线背后,其实就是三种哲学:
马斯克,是激进的未来主义者,愿意把所有筹码都压在纯视觉上;
Uber,是现实主义者,它要的是稳定落地、能快速盈利的方案;
而李彦宏,则是务实的技术主义者,他承认未来的可能性,但脚踏实地,把能跑通的路线先走下去。
到这里,其实问题已经很清晰了:纯视觉还是激光雷达,并不是非此即彼的答案。今天的现实是——激光雷达让无人驾驶能够更快规模化落地;而明天,也许纯视觉会迎来属于它的时刻。无人驾驶的世界,可能最后走向的是“多路线融合”,而不是“胜者通吃”。
所以我个人的看法是:这场争论,短期内不会有结果,但长期来看,它能推动整个行业不断前进。就像科学史上的很多路线之争,往往不是谁错谁对,而是不同路径共同把门槛推高,最后我们所有人,都能从中受益。这,也许就是无人驾驶路线之争,最值得我们期待的地方。
马斯克称激光雷达会让辅助驾驶更危险大v聊车