
这种水上机器人不仅能干活,还能当“食物”!咋做到的?
大家好!今天一起探秘可食用水上机器人。这些小小的机器人可不简单,它们在环保、生物研究等领域有着巨大的潜力,能解决不少大问题呢!让我们一起揭开它们的神秘面纱。
*本文只做阅读笔记分享*
一、现有问题与研究背景
在环境监测、水下探索这些领域,厘米级的水上机器人用处可大了。它们身形小巧,耗电少,对环境影响也小,能在复杂的水域自由穿梭。不过,现在的水上机器人大多用的是人工塑料聚合物和商业电子元件,要是没回收好,留在自然环境里,野生动物不小心吃了,那可就麻烦大了,会造成环境污染和生态破坏。所以,研发更环保、安全的水上机器人迫在眉睫。
二、可食用水上机器人的设计与原理
为了解决上面这些问题,研究人员搞出了一种全新的可食用水上机器人。它的身体是用冻干鱼食做的,能给水里的动物提供营养。它靠马兰戈尼效应来实现自主推进,这个效应简单来说,就是通过释放表面活性剂,降低水的表面张力,推动机器人前进。
结构组成:机器人主要有两部分。一部分是船型的主体,就像小船一样提供浮力,还能指引运动方向,它用的材料来自商业鱼饲料颗粒,营养丰富。另一部分是流体致动器,这里面装着液体表面活性剂当燃料,还有个化学反应室。化学反应室里有柠檬酸和碳酸氢钠这些粉末状化学品,遇到水就会反应产生二氧化碳气体。
工作原理:当机器人放到水面上,流体致动器底部的透水膜会吸水,触发柠檬酸和碳酸氢钠反应,产生的二氧化碳气体就像小马达一样,把燃料从储液器里挤出去。燃料一出来,就会降低机器人后面水的表面张力,前面的表面张力大,后面的小,这样就产生了张力梯度,推着机器人向前跑啦。

三、关键部分的设计与选择
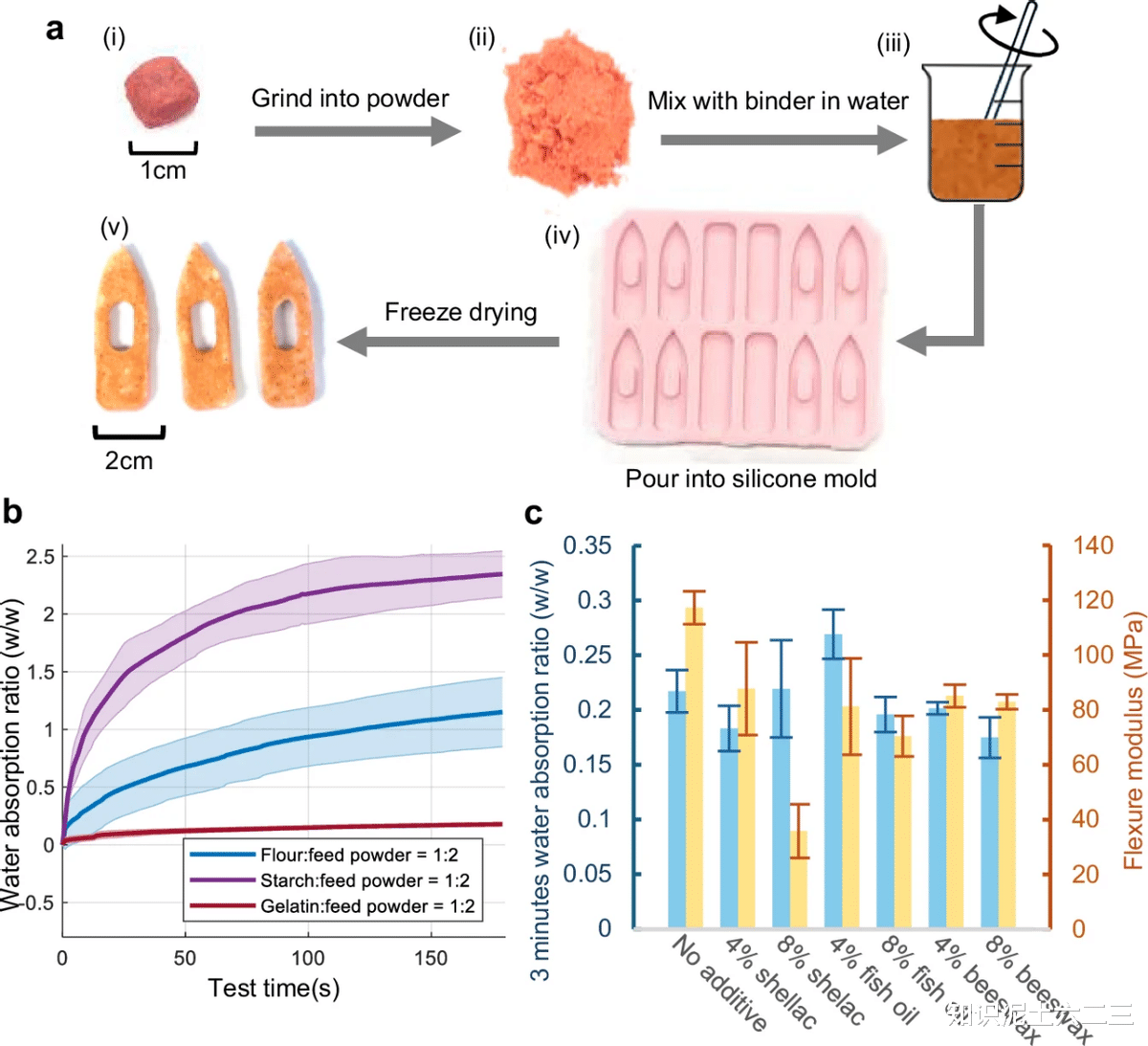
船体结构:船体材料选的是商业鱼饲料颗粒,为了让它跑得更快,材料密度得尽量低,还得保证结构结实。研究人员把它设计成流线型,估算出的阻力系数在0.76到1.60之间。制作的时候,先把饲料颗粒磨成粉,加上聚合物粘合剂,倒在船型模具里冻干。不过冻干后的食物孔隙大,容易吸水,会影响机器人性能。研究人员试了淀粉、面粉、明胶这三种可食用粘合剂,发现明胶做粘合剂的样品吸水性最低,所以就用它来制作船体。
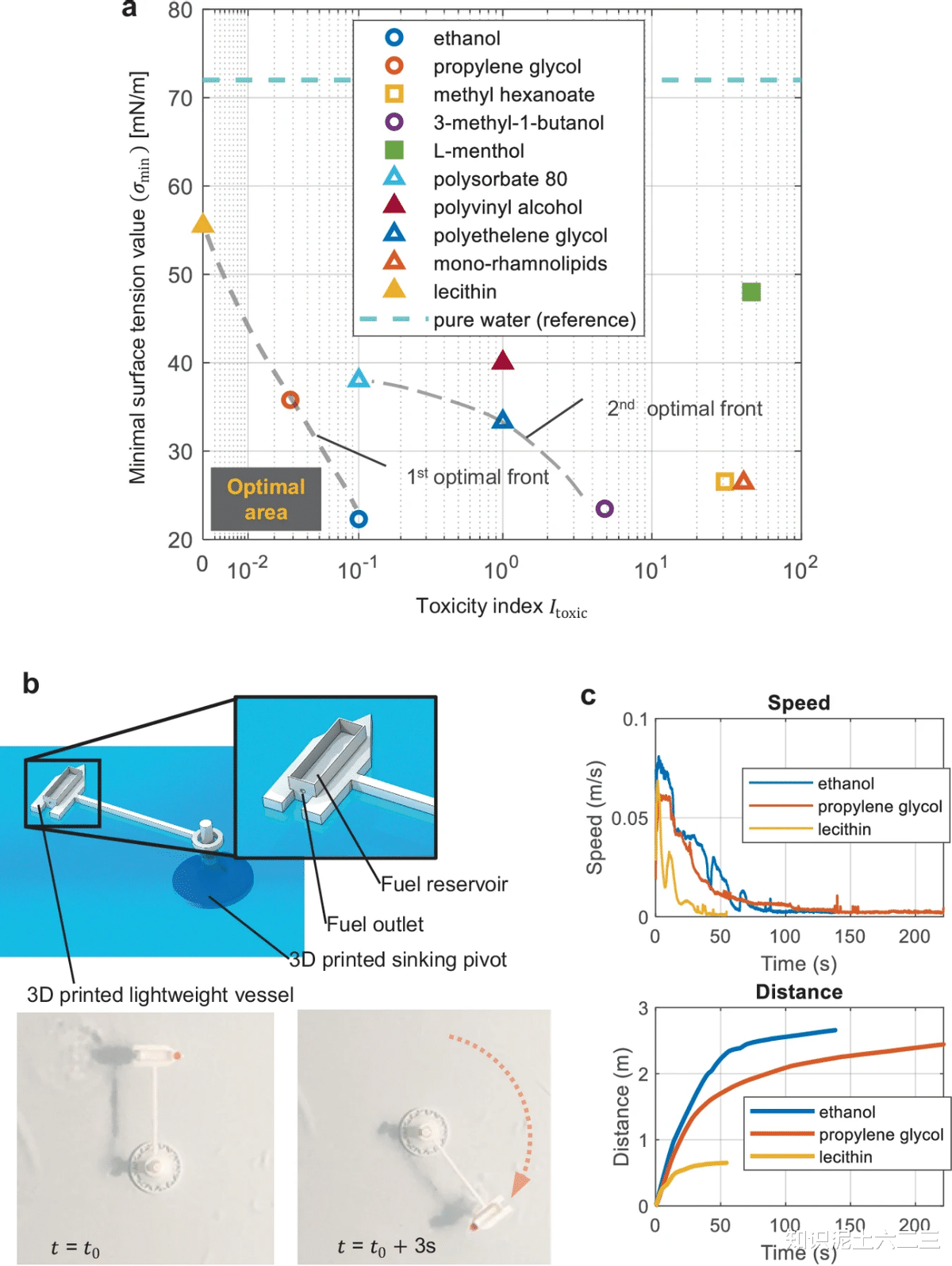
燃料选择:选燃料可大有讲究,既要能最大程度降低水的表面张力,又得对水生生物毒性最小。研究人员从食品添加剂里选了几种表面活性剂,通过建立毒性指数来比较它们的环境影响。像卵磷脂、丙二醇、乙醇都在备选名单里。经过实验,虽然卵磷脂很安全,但它溶解性低,容易让水面饱和,影响机器人运动时间。乙醇毒性又比较大,相比之下,丙二醇虽然提供的运动能量比乙醇少,但它毒性低,安全性高,还是水产养殖里认可的饲料添加剂,所以就成了最佳燃料选择。
流体致动器:流体致动器就像是机器人的“动力心脏”,负责装燃料和产生推动燃料的气体。它由两层明胶构成,明胶既有营养,又方便制作成毫米级的胶囊。燃料储液器设计成波浪形通道,能装更多燃料,还能让燃料平稳排出。化学反应室里装着产生气体的试剂,为了控制气体产生速度,还会加入乙基纤维素。通过这些设计,就能调节机器人的运动时间和速度啦。

四、机器人的性能测试与特点
性能测试:研究人员制作了12个可食用水上机器人,在大水箱里测试它们的运动性能。记录下它们的触发时间、排出时间、运动轨迹和速度。结果发现,这些机器人的运动轨迹不是直线,而是像随机游走一样,还挺有趣。不过别小看这种不规则运动,它能让机器人在水面上分布得更均匀,说不定还能吸引捕食性鱼类呢。而且,机器人的速度和运动时间都在预期范围内,和模型预测的差不多。
特点总结:这种可食用水上机器人优点可不少。它完全可生物降解,对环境特别友好,就算被野生动物吃了也没关系。它的成分能根据不同需求调整,可以给特定的水生动物提供营养或者药物。不过它也有一些不足,比如制作过程比较依赖手工,导致不同机器人之间有些性能差异;而且因为很少用电子元件,它的可控性和机动性也比较有限。

五、应用前景与展望
可食用水上机器人的应用前景特别广阔。它可以装上可生物降解的传感器,成群结队地去监测环境,还不会伤害水生动物,完成任务后还能当作饲料被吃掉,或者自然降解。在宠物和动物研究领域,它说不定能给水生宠物提供捕食训练和认知刺激,提高动物福利。虽然目前还有一些问题,但随着技术发展,未来肯定能进一步优化,发挥更大的作用。今天的分享就到这里啦,希望大家对可食用水上机器人有了新的认识!
六、一起来做做题吧
1、关于现有水上机器人的描述,正确的是?
A. 多采用可生物降解材料
B. 主要由人工塑料聚合物和商业电子元件构成
C. 不会对自然环境造成任何影响
D. 仅适用于大型水域监测
2、可食用水上机器人的动力来源是?
A. 太阳能
B. 马兰戈尼效应引发的推进力
C. 内置微型电池
D. 风力
3、在制作可食用水上机器人的船体时,选择明胶作为粘合剂的主要原因是?
A. 明胶价格便宜
B. 明胶来源广泛
C. 明胶能使船体结构更美观
D. 明胶制成的样品吸水性低
4、可食用水上机器人选择丙二醇作为燃料,主要是因为?
A. 丙二醇价格最低
B. 丙二醇提供的运动能量最多
C. 丙二醇毒性低且安全性高
D. 丙二醇容易获取
5、可食用水上机器人在实际测试中,运动轨迹呈现出怎样的特点?
A. 完全直线运动
B. 规则的曲线运动
C. 不规则的伪随机运动
D. 原地打转
参考文献:
Zhang, S., et al. Edible aquatic robots with Marangoni propulsion. Nat Commun 16, 4238 (2025).
