
为什么“人形机器人”越来越受欢迎?
众所周知,前两周机器人已经能跑半马了。
但比赛后,有种评论说:“这场机器人半马,打破了大众对机器人一切不切实际的认知”。
对于非从业者来说,仅仅看比赛过程和结果,的确没达到大众的想象,不过无论是政策还是资本乃至人才流动上,人形机器人正越来越受欢迎。
为什么?
先说优点
一是多功能性,人形机器人的特色是“像人”,可以无缝融入人类环境,适应为人类设计的空间,如门、楼梯和杂物间……无需修改现有基础设施。
二是能执行多种任务,从家务劳动到复杂的工业操作,甚至诸多危险性与重复性任务这些对人来说或危险或单调的工作,进而提升安全性和效率。
三是人机交互性,人形外观和运动模式使机器人易于与人类互动,更适合服务、医疗、教育等领域,潜力巨大,至少你不会觉得服务你机器人“很奇怪”,尤其是借助运动研究后,在康复机器人等领域可以开发高效的运动模式,这些甚至要比“真人”更加合适。
再说目前难点
最大的问题不是大脑(即AI),而是硬件(身体)。
硬件里执行器与关节“柔顺性”是关键,高性能执行器需要足够精确和响应迅速来实时调整姿态。控制系统的带宽则直接影响稳定性,这两点处理不好,机器人就会显得非常笨拙且“卡顿”。
足部设计也是一大难点,所以有些公司只开发上半身,甚至只有机械臂,目前多触点(如脚趾、脚跟和大面积边缘)有助于更精细的平衡调整,不少机器人使用软性或自适应鞋底以增加抓地力。
重量分布与质心也是个技术活儿,宇树科技上春晚的并不是最强版本产品,原因就是“上镜版”身高与人类类似,看起来更加镜头友好……但其实较低的质心使机器人更稳定,而合理的肢体质量分布,才能确保大幅度动作不会破坏平衡,换句话说,未来走进社会的机器人,以“矮个子”居多。
其他还包括了传感器与反馈系统,电力传输和能量存储,以及机械阻尼和减震装置等。
还有一个在机器人半马中明显体现出的“过热”问题——导致了大部分机器人无法完赛,就算完成,也要多次更换电池、甚至用同型号的产品来“替跑”,原因就在于电机的功率输出和扭矩受热限制——过热会导致电机效率降低、热节流甚至系统关闭,而电池包也面临类似挑战。
除了硬件外,软件挑战也不少。
比如平衡控制——即软件实时预测、反应并从干扰中恢复;状态估计——即准确估计机器人的当前状态,包括位置、速度和姿态以及实时控制——在短时间内做出决策并执行,以保持稳定。
不过随着AI大模型的发展,正在重塑机器人。AI不断对人形机器人完成迭代优化,相比“身体”的物理进化,大脑(AI)的发展速度则要快得多,比如RL强化学习通过试错学习,给特定场景带来最优行为策略;BC行为克隆是模仿人类行为来训练机器人,扩散模型用来生成新的行为模式,进化策略则是通过模拟自然选择过程来优化机器人性能。
事实上,很多多数机器人公司发布的demo演示视频都是“精加工”的宣传片,可能经过了多次拍摄与剪辑,最后拿出了最完美的一次来展示,只有真实的环境下,才能暴露出所有的问题。
降低大众与人形机器人的阈值,就需要更多的类似“机器人半马”的公开活动。
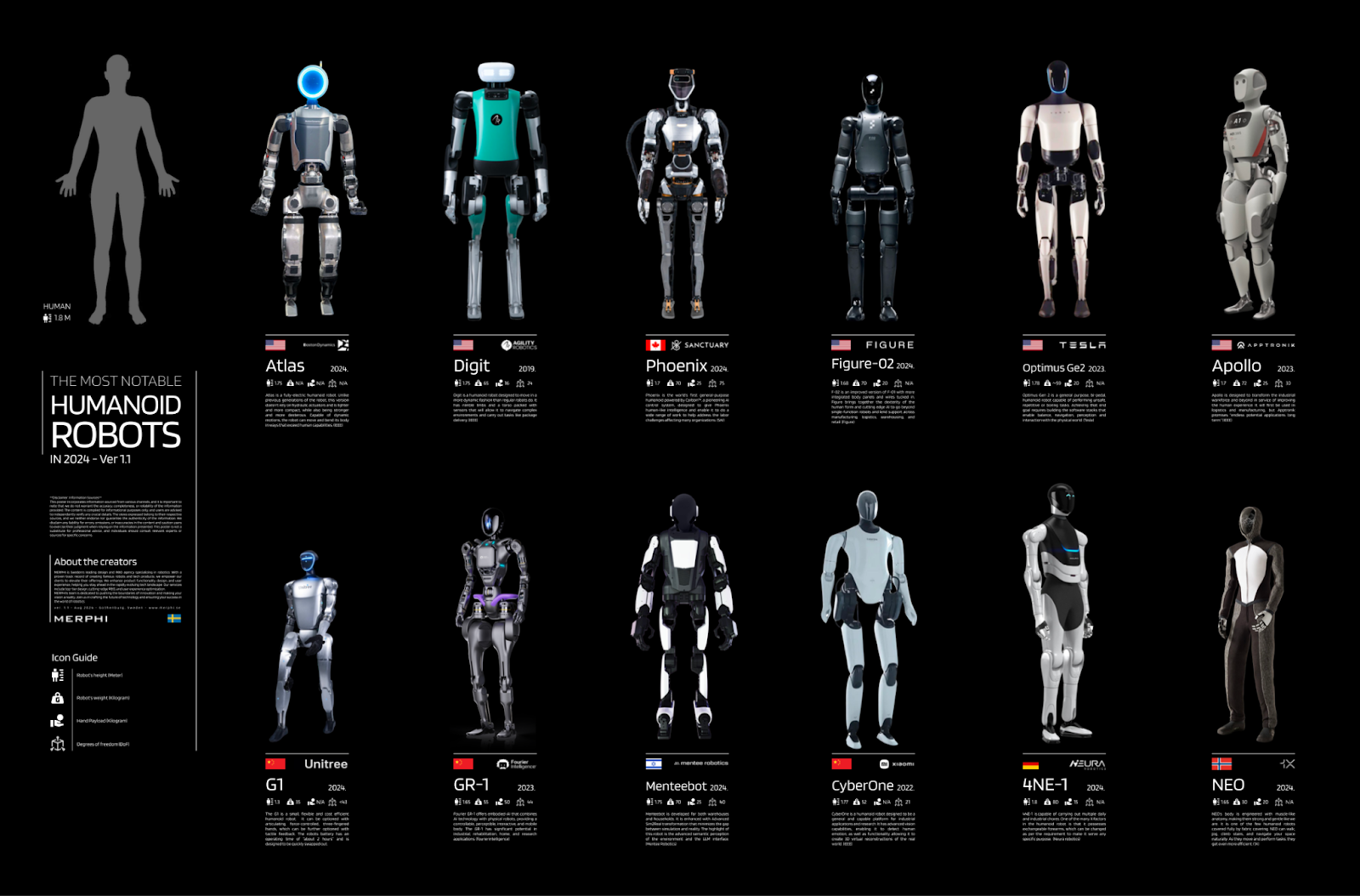
ps. 人形机器人发展的多快呢,文章头图是2024年的主流机器人,下面的则是2021年的主流机器人,你们自己感受下:

